
「実物大のガンダムが動いたらどんな感じなんだろう。想像するだけですごくワクワクします」
そう語るのは、全長18mの巨大ヒューマノイドロボットの実現を目指す、有限会社はじめ研究所の代表、坂本元さん。
▲有限会社はじめ研究所 坂本元(はじめ)さん
ガンダムが動くところを自分で見てみたい
そんな想いの下はじまったこのプロジェクトは、スタートから7年を経て、世界最大の全長4mにたどり着きました。
さらなる大型化のため日々研究開発に励む、有限会社はじめ研究所坂本さんとプロジェクトメンバーである吉則工業金増健次さんに、プロジェクトのこれまでとこれからについて詳しく伺いました。
▲有限会社吉則工業 金増健次さん
※
有限会社はじめ研究所
ヒューマノイドロボット(人型ロボット)開発の専門会社。大学・企業の研究機関、テーマパーク、遊園地向けに、研究用ロボット・エンターテイメントロボットを新規開発。40cmの小型から4mの超大型まで、これまでに50種類200体以上のヒューマノイドロボットを開発。
※有限会社吉則工業
昭和35年創業。現場作業向けの機械の設計・製作・据付調整、及びメンテナンスまで一貫して行う。モットーは、現場作業者の立場にたった機械造り。開発・研究用のオリジナル試験機も開発しており、各研究機関から高い評価を得ている。
町工場の職人とロボット研究者が共同で目指す、巨大ロボットプロジェクト!

コックピット内蔵型ヒューマノイドロボット(43号機)は、内部にコックピットを搭載し、中から操縦できる世界初のヒューマノイドロボット。
頭と肩にカメラがついており、内部のモニターを確認しながらコントローラで操縦することができます。
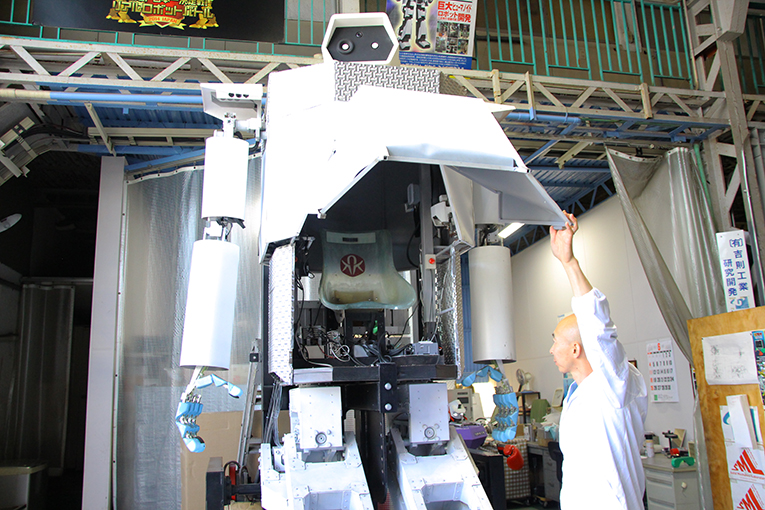
上半身の操作は、内部にある人形を動かすとその動きに合わせてロボットが動くマスタースレーブ方式を採用。下半身は、コックピットの内部にあるジョイスティックで操作します。それぞれの関節には動きを制御するサーボモータがついており、ロボットの動きをコントロールしています。

▲コックピット内部にある人形。こちらの腕の部分を動かすと連動してロボットが動く。
有限会社はじめ研究所の坂本さんが中心となり、西淀川の町工場の方々と共同で進めるこのプロジェクト。
ものづくりのプロフェッショナル集団である西淀川経営改善研究会(NKK)に所属する金増さんが、事業活性化の一貫で、ロボット開発に興味をもったのがきっかけだったといいます。
「テレビでロボカップというロボットを使ったサッカーのワールドカップが行われていて、新しい技術の習得や事業化を目指してNKKでもロボットを開発できないかと思ったんです。それまでロボット開発の経験がなかったので、専門家の方を招いて勉強会を開こうということになり、そのときに講師として来ていただいたのが坂本さんでした」
NKKの勉強会に参加するまでは、1人でヒューマノイドロボットの研究・開発を行っていた坂本さん。
2002年の会社設立以降、次々にヒューマノイドロボットを開発し、ロボットの格闘技大会「ROBO-ONE」では毎回決勝リーグに出場。
2005年の「愛・地球博」ではロボットのデモンストレーションを披露するなど、坂本さんはすでにロボット業界の有名人でした。
「独立するまでは設計が専門だったので、ロボットのフレームだったり基盤だったりの開発は独学でやっていたんです。勉強会に参加して、それぞれのプロフェッショナルの方が集まっているということで、ロボットをどう動かすかという設計・プログラムの部分は僕が中心となって行い、その他の部分は専門家の方に任せてチームで開発してみようということになりました」
その年、ロボカップ世界大会が大阪で開催されることもあり、有限会社はじめ研究所とNKKがタッグを組み、サッカー用ロボットを開発するプロジェクトがスタート。
坂本さんのロボットの知識と経験にNKKの技術力が加わり、高性能なヒューマノイドロボットを開発。
大阪大会では、日本ロボット学会賞を受賞した他、その後のロボカップでは優勝、上位入賞を重ね、はじめ研究所とNKKは着実に実績を積み上げていきました。

ロボカップへの出場と合わせて、坂本さんのかねてからの野望だった巨大ヒューマノイドロボット(ロボットアニメ「機動戦士ガンダム」のモビルスーツ)の開発がスタート。
2007年には1m、2009年には2m、少しずつ規模を大きくしていき、2010年からは全長4mのヒューマノイドロボットプロジェクトがスタートしました。
7年の開発を経て、昨年からさまざまな場所でお披露目されている4mのヒューマノイドロボット。
このプロジェクトはどのように進行していったのか?
続いて、開発過程について詳しく伺います。
未知の領域、歩く4mロボットの開発過程とは?

このプロジェクトには、坂本さんを中心に、さまざまな専門技術をもつ10名前後のプロフェッショナルが参加。
設計・プログラミングなどを坂本さんが行い、開発に必要な部品はそれぞれの専門家に協力を仰ぎました。
「フレームのレーザーカット、精密機器の金型製作、基盤、試験機など、西淀川にはロボットの部品を開発・テストするための環境・専門家が揃っています。既存の部品で使えるものは使いつつ、どうしても足りないものは専門家に相談して部品を開発しました」
既存の部品をうまく使いつつ、足りないものは技術力を活かしてプロジェクトが進みました。
そんな開発過程において、もっとも難しかったのは「部品の軽さと耐久性」の両立。
4mのロボットは、普通の部品を使うと重すぎて歩くことができません。
極限まで部品の重量を軽くする必要がありますが、そうすると今度は耐久性が課題となります。

「歩行するとき片足に全体重が乗るので、それに耐えうる耐久性と強度が必要不可欠です。しかし、そこにこだわって作ると、重くなりすぎてとてもじゃないけど歩けません。一度組み上げてしまうと作り直しができないので、耐久性と軽さを両立させるためにCADでシミュレーションをしたり、プログラムを組んで数値を計算したり、入念に下調べをしてから耐久性と軽さが両立するように設計しました」
ロボットを構成するさまざまな部品の中でも、特に課題となったのがロボットの動きを制御するサーボモータ。このロボットのサーボモータには産業用のものを流用しているものの、歩行専用ではないため調整が難しいとのこと。

▲腕の関節にあたる部分。接続部の中心にある銀色の素材がサーボモータ。
「私達が歩行するとき、身体へのダメージを減らすために地面に足をつける瞬間に少し力を抜いているんですよ。産業用のモータでは、人間のように微妙な力加減を調整することができません。そのままだと力を抜かずないまま地面を踏んでしまうので、ロボットがすぐに壊れてしまんです」
そんな産業サーボモータの弱点を解消するため、足の裏に衝撃を吸収する特殊なゴムをつけてダメージを緩和させていると坂本さん。
サイズが大きくなるにつれて衝撃が強くなるため、資金のめどがつけば歩行専用モータの開発も視野に入れているといいます。
▲4メートルのロボットが歩行する様子。※映像提供:有限会社はじめ研究所
昨年以降、イベントなどでデモンストレーションを行いながら、動きや乗り心地を改良。
次なる8mロボットの開発のために、止まることなく研究・開発を進めています。
次に目指すは8メートル。技術力と経験をもとに「実物大ガンダム」を目指す

坂本さんがヒューマノイドロボットの開発を始めてから14年。
これまでの開発過程で坂本さんがもっとも印象に残っているのは、4mロボットの歩行にはじめて成功した瞬間だったとのこと。
「下半身とコックピット部分が完成したときに、歩行テストを行ったんですよ。シミュレーションを念入りに行っているので、理論的に歩行できるのはわかっているんですが、やっぱりドキドキしました。設計通りにロボットがゆっくりと歩き出した光景は今でも忘れません。こんなに大きなものが本当に動くんだと感動しましたね」
世界最大の二足歩行ヒューマノイドロボットを実現した坂本さんとNKK。
次なる目標は全長8m。部品のひとつひとつのサイズが大きくなり、歩行時の衝撃がより強くなるため、さらなる軽量化・耐久性の向上が必要不可欠になります。
技術的なハードルはさらに高くなるものの、坂本さんと金増さんは次なる挑戦にも意欲的。
西淀川で培った技術力とこれまでの経験を次なる挑戦にぶつけます。
「資金調達と技術的なハードルがネックになりますが、8m、18mのヒューマノイドロボットが歩いたら、どうなるんだろうと想像するだけでワクワクします。今は次の開発に向けた準備段階ですが、18mに到達するまで、諦めずに開発を続けていきます」
頭の中に思い描いたイメージを現実のものに。
18mのロボットが大地を駆けるその日まで、坂本さんとNKKの挑戦はまだまだ続きます。









